On Monday researchers from Cornell University showed a pair of bio-inspired robotics that runs on a hydraulic battery powered by fluid. The Redox flow battery (RFB) also imitates biological functions, as it releases electrolytic fluids, which dissolve to create energy through chemical reaction.
The first two robots on display are a modular worm and a jellyfish, designed by the Cornell Engineering Labs. The batteries that fuel these systems use embodied energy, “an approach that incorporates sources of power into the body of a machine, to reduce their weight and cost”, according to the school.
Rob Shepherd, professor of mechanical and aerospace engineering, then describes the technology below: “There are many robots that are fed in a hydraulic way and we are the first to use the hydraulic fluid as a battery, which reduces the overall weight of the robot, because the La Battery has two purposes, providing the energy for the system and providing the strength to make it move. “
In addition to improving speed and movements, battery technology has extended the runtime of the Jellyfish robot at an hour and a half. The robot itself was built at the top of the technology that the school used in the development of a biological robot inspired by lion fish. When that system was presented in 2019, the researchers referred to the circulating liquid as “robotic blood”, which presumably makes the battery a robotic heart.
The RFB that feeds the gelatin has a tendon that pushes the robot upwards when it is flexed in the shape of a bell. When the shape is relaxed, the robot sinks. Filming of the system in action show family movements similar to jellies while navigating through water.
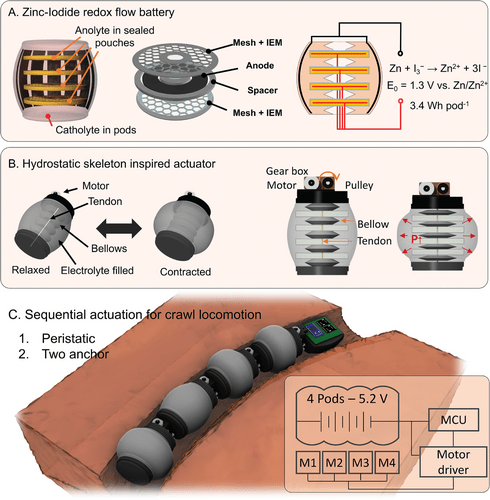
In the meantime, the Worm is built by modular segments, similar to those seen on larger snake robots. Each segment contains a motor and curtain actuator, which expands and contracts to create locomotion.
The team observes that the transition from underwater on the ground presented its challenges. The main among them is the fact that the submerged robots do not require a rigid skeletal structure.
“Here’s how life on Earth has evolved,” says Shepherd. “Start with fish, then get a simple organism and is supported from the ground. Worm is a simple organism, but has more degrees of freedom. “

